Arduino Send-Receive Data via Ad hoc WIFI
by STK@TEE>
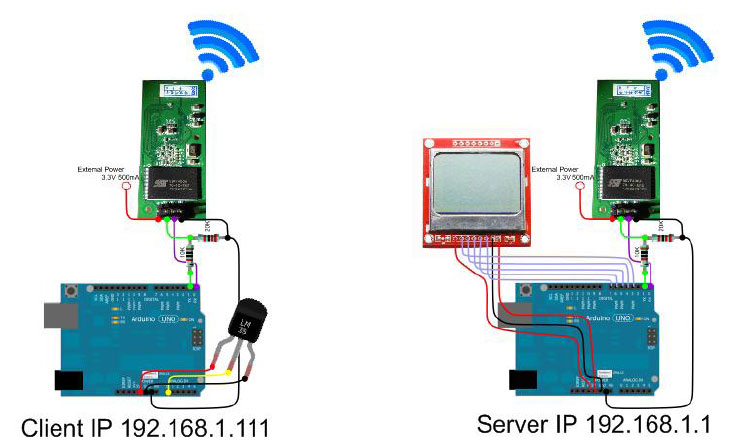
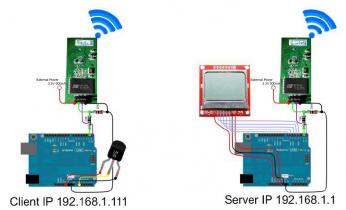
การทดลองใช้บอร์ด Arduino และโมดูล Wifi โมดูล M03 สร้างเครือข่ายแบบ Ad hoc แล้วกาหนดให้ ทางานเป็น TCP Server ใช้มีหมายเลข IP 192.168.1.1 รับส่ง Data ที่ Port 8000 แล้วคอยรับค่ามาแสดงผลที่หน้าจอ LCD ซึ่ง Data นั้นเป็นค่าอุณหภูมิที่ถูกส่งมาจากบอร์ด Arduino อีกชุดหนึ่งที่ทางานร่วมกับโมดูล UART To Wi-Fi ที่เราได้กาหนดค่าให้ทางานเป็น TCP Client IP 192.168.1.111 และส่ง Data ทั้งหมดไปที่ Server IP 192.168.1.1 Port 8000
กรุณาอ่านคู่มือการใช้งานของ M03 เพิ่มเติมสำหรับการ Set Adhoc
Source Arduino Server IP 192.168.1.1
#define PIN_SCE 7
#define PIN_RESET 6
#define PIN_DC 5
#define PIN_SDIN 4
#define PIN_SCLK 3
#define LCD_C LOW
#define LCD_D HIGH
#define LCD_X 84
#define LCD_Y 48
#define LCD_CMD 0
char data[10];
char input;
unsigned char cnt=0;
static const byte ASCII[][5] =
{
{0x00, 0x00, 0x00, 0x00, 0x00} // 20
,{0x00, 0x00, 0x5f, 0x00, 0x00} // 21 !
,{0x00, 0x07, 0x00, 0x07, 0x00} // 22 "
,{0x14, 0x7f, 0x14, 0x7f, 0x14} // 23 #
,{0x24, 0x2a, 0x7f, 0x2a, 0x12} // 24 $
,{0x23, 0x13, 0x08, 0x64, 0x62} // 25 %
,{0x36, 0x49, 0x55, 0x22, 0x50} // 26 &
,{0x00, 0x05, 0x03, 0x00, 0x00} // 27 '
,{0x00, 0x1c, 0x22, 0x41, 0x00} // 28 (
,{0x00, 0x41, 0x22, 0x1c, 0x00} // 29 )
,{0x14, 0x08, 0x3e, 0x08, 0x14} // 2a *
,{0x08, 0x08, 0x3e, 0x08, 0x08} // 2b +
,{0x00, 0x50, 0x30, 0x00, 0x00} // 2c ,
,{0x08, 0x08, 0x08, 0x08, 0x08} // 2d -
,{0x00, 0x60, 0x60, 0x00, 0x00} // 2e .
,{0x20, 0x10, 0x08, 0x04, 0x02} // 2f /
,{0x3e, 0x51, 0x49, 0x45, 0x3e} // 30 0
,{0x00, 0x42, 0x7f, 0x40, 0x00} // 31 1
,{0x42, 0x61, 0x51, 0x49, 0x46} // 32 2
,{0x21, 0x41, 0x45, 0x4b, 0x31} // 33 3
,{0x18, 0x14, 0x12, 0x7f, 0x10} // 34 4
,{0x27, 0x45, 0x45, 0x45, 0x39} // 35 5
,{0x3c, 0x4a, 0x49, 0x49, 0x30} // 36 6
,{0x01, 0x71, 0x09, 0x05, 0x03} // 37 7
,{0x36, 0x49, 0x49, 0x49, 0x36} // 38 8
,{0x06, 0x49, 0x49, 0x29, 0x1e} // 39 9
,{0x00, 0x36, 0x36, 0x00, 0x00} // 3a :
,{0x00, 0x56, 0x36, 0x00, 0x00} // 3b ;
,{0x08, 0x14, 0x22, 0x41, 0x00} // 3c <
,{0x14, 0x14, 0x14, 0x14, 0x14} // 3d =
,{0x00, 0x41, 0x22, 0x14, 0x08} // 3e >
,{0x02, 0x01, 0x51, 0x09, 0x06} // 3f ?
,{0x32, 0x49, 0x79, 0x41, 0x3e} // 40 @
,{0x7e, 0x11, 0x11, 0x11, 0x7e} // 41 A
,{0x7f, 0x49, 0x49, 0x49, 0x36} // 42 B
,{0x3e, 0x41, 0x41, 0x41, 0x22} // 43 C
,{0x7f, 0x41, 0x41, 0x22, 0x1c} // 44 D
,{0x7f, 0x49, 0x49, 0x49, 0x41} // 45 E
,{0x7f, 0x09, 0x09, 0x09, 0x01} // 46 F
,{0x3e, 0x41, 0x49, 0x49, 0x7a} // 47 G
,{0x7f, 0x08, 0x08, 0x08, 0x7f} // 48 H
,{0x00, 0x41, 0x7f, 0x41, 0x00} // 49 I
,{0x20, 0x40, 0x41, 0x3f, 0x01} // 4a J
,{0x7f, 0x08, 0x14, 0x22, 0x41} // 4b K
,{0x7f, 0x40, 0x40, 0x40, 0x40} // 4c L
,{0x7f, 0x02, 0x0c, 0x02, 0x7f} // 4d M
,{0x7f, 0x04, 0x08, 0x10, 0x7f} // 4e N
,{0x3e, 0x41, 0x41, 0x41, 0x3e} // 4f O
,{0x7f, 0x09, 0x09, 0x09, 0x06} // 50 P
,{0x3e, 0x41, 0x51, 0x21, 0x5e} // 51 Q
,{0x7f, 0x09, 0x19, 0x29, 0x46} // 52 R
,{0x46, 0x49, 0x49, 0x49, 0x31} // 53 S
,{0x01, 0x01, 0x7f, 0x01, 0x01} // 54 T
,{0x3f, 0x40, 0x40, 0x40, 0x3f} // 55 U
,{0x1f, 0x20, 0x40, 0x20, 0x1f} // 56 V
,{0x3f, 0x40, 0x38, 0x40, 0x3f} // 57 W
,{0x63, 0x14, 0x08, 0x14, 0x63} // 58 X
,{0x07, 0x08, 0x70, 0x08, 0x07} // 59 Y
,{0x61, 0x51, 0x49, 0x45, 0x43} // 5a Z
,{0x00, 0x7f, 0x41, 0x41, 0x00} // 5b [
,{0x02, 0x04, 0x08, 0x10, 0x20} // 5c ¥
,{0x00, 0x41, 0x41, 0x7f, 0x00} // 5d ]
,{0x04, 0x02, 0x01, 0x02, 0x04} // 5e ^
,{0x40, 0x40, 0x40, 0x40, 0x40} // 5f _
,{0x00, 0x01, 0x02, 0x04, 0x00} // 60 `
,{0x20, 0x54, 0x54, 0x54, 0x78} // 61 a
,{0x7f, 0x48, 0x44, 0x44, 0x38} // 62 b
,{0x38, 0x44, 0x44, 0x44, 0x20} // 63 c
,{0x38, 0x44, 0x44, 0x48, 0x7f} // 64 d
,{0x38, 0x54, 0x54, 0x54, 0x18} // 65 e
,{0x08, 0x7e, 0x09, 0x01, 0x02} // 66 f
,{0x0c, 0x52, 0x52, 0x52, 0x3e} // 67 g
,{0x7f, 0x08, 0x04, 0x04, 0x78} // 68 h
,{0x00, 0x44, 0x7d, 0x40, 0x00} // 69 i
,{0x20, 0x40, 0x44, 0x3d, 0x00} // 6a j
,{0x7f, 0x10, 0x28, 0x44, 0x00} // 6b k
,{0x00, 0x41, 0x7f, 0x40, 0x00} // 6c l
,{0x7c, 0x04, 0x18, 0x04, 0x78} // 6d m
,{0x7c, 0x08, 0x04, 0x04, 0x78} // 6e n
,{0x38, 0x44, 0x44, 0x44, 0x38} // 6f o
,{0x7c, 0x14, 0x14, 0x14, 0x08} // 70 p
,{0x08, 0x14, 0x14, 0x18, 0x7c} // 71 q
,{0x7c, 0x08, 0x04, 0x04, 0x08} // 72 r
,{0x48, 0x54, 0x54, 0x54, 0x20} // 73 s
,{0x04, 0x3f, 0x44, 0x40, 0x20} // 74 t
,{0x3c, 0x40, 0x40, 0x20, 0x7c} // 75 u
,{0x1c, 0x20, 0x40, 0x20, 0x1c} // 76 v
,{0x3c, 0x40, 0x30, 0x40, 0x3c} // 77 w
,{0x44, 0x28, 0x10, 0x28, 0x44} // 78 x
,{0x0c, 0x50, 0x50, 0x50, 0x3c} // 79 y
,{0x44, 0x64, 0x54, 0x4c, 0x44} // 7a z
,{0x00, 0x08, 0x36, 0x41, 0x00} // 7b {
,{0x00, 0x00, 0x7f, 0x00, 0x00} // 7c |
,{0x00, 0x41, 0x36, 0x08, 0x00} // 7d }
,{0x10, 0x08, 0x08, 0x10, 0x08} // 7e ←
,{0x00, 0x06, 0x09, 0x09, 0x06} // 7f →
};
void LcdCharacter(char character)
{
LcdWrite(LCD_D, 0x00);
for (int index = 0; index < 5; index++)
{
LcdWrite(LCD_D, ASCII[character - 0x20][index]);
}
LcdWrite(LCD_D, 0x00);
}void LcdClear(void)
{
for (int index = 0; index < LCD_X * LCD_Y / 8; index++)
{
LcdWrite(LCD_D, 0x00);
}
}
void LcdInitialise(void)
{
pinMode(PIN_SCE, OUTPUT);
pinMode(PIN_RESET, OUTPUT);
pinMode(PIN_DC, OUTPUT);
pinMode(PIN_SDIN, OUTPUT);
pinMode(PIN_SCLK, OUTPUT);
digitalWrite(PIN_RESET, LOW);
// delay(1);
digitalWrite(PIN_RESET, HIGH);
LcdWrite( LCD_CMD, 0x21 ); // LCD Extended Commands.
LcdWrite( LCD_CMD, 0xB5 ); // Set LCD Vop (Contrast). //B1
LcdWrite( LCD_CMD, 0x04 ); // Set Temp coefficent. //0x04
LcdWrite( LCD_CMD, 0x14 ); // LCD bias mode 1:48. //0x13
LcdWrite( LCD_CMD, 0x0C ); // LCD in normal mode. 0x0d for inverse
LcdWrite(LCD_C, 0x20);
LcdWrite(LCD_C, 0x0C);
}
void LcdString(char *characters)
{
while (*characters)
{
LcdCharacter(*characters++);
}
}
void LcdWrite(byte dc, byte data)
{
digitalWrite(PIN_DC, dc);
digitalWrite(PIN_SCE, LOW);
shiftOut(PIN_SDIN, PIN_SCLK, MSBFIRST, data);
digitalWrite(PIN_SCE, HIGH);
}
// gotoXY routine to position cursor
// x - range: 0 to 84
// y - range: 0 to 5
void gotoXY(int x, int y)
{
LcdWrite( 0, 0x80 | x); // Column.
LcdWrite( 0, 0x40 | y); // Row.
}
void drawLine(void)
{
unsigned char j;
for(j=0; j<84; j++) // top
{
gotoXY (j,0);
LcdWrite (1,0x01);
}
for(j=0; j<84; j++) //Bottom
{
gotoXY (j,5);
LcdWrite (1,0x80);
}
for(j=0; j<6; j++) // Right
{
gotoXY (83,j);
LcdWrite (1,0xff);
}
for(j=0; j<6; j++) // Left
{
gotoXY (0,j);
LcdWrite (1,0xff);
}
}void setup(void)
{
Serial.begin(115200);
LcdInitialise();
LcdClear();
gotoXY(4,1);
LcdString ("Temperature");
}
void loop(void)
{
if (Serial.available() > 0)
{
input = Serial.read();
Serial.print(input);
if(input == 0x0D)
{
data[cnt]=0;
gotoXY(25,3);
Serial.print(data);
LcdString (" ");
gotoXY(25,3);
LcdString (data);
memset(data,0,10);
cnt=0;
}
else
{
data[cnt] = input;
cnt++;
}
if(cnt > 9)
{
memset(data,0,10);
cnt=0;
}
}
}Source Arduino Client IP 192.168.1.111
int sensorPin = 0;
void setup()
{
Serial.begin(115200);
}
void loop()
{
int reading = analogRead(sensorPin);
float voltage = reading * 5.0;
voltage /= 1024.0;
float temperatureC = voltage*100 ;
Serial.print(temperatureC);
Serial.print(" C\n");
delay(1000); //waiting a second
}